IMU INTEGRATION
Survey-grade high-speed GPS is the most accurate way to measure velocity – as long as view to the sky is clear.
Problems arise when buildings or tall trees obstruct the testing ground. If the GPS signal is interrupted, dropouts cause spikes in data, which is not ideal when you are relying on a clean velocity signal.
In order to keep high GPS accuracy even where sky visibility is less than perfect, Racelogic couples data from an IMU and the VBOX 3i GPS data logger.
By blending GPS with data from an Inertial Measurement Unit, housing three gyros and three accelerometers, smoother, more reliable data is produced. The solution can deal with GPS dropouts, maintaining high accuracy. IMU integration realises the high accuracies that VBOX 3i can achieve even when external conditions are compromised, meaning that data has now become more reliable and easier to interpret.
How does IMU Integration improve the GPS data channels?
VELOCITY
IMU integration decreases the noise for a more accurate reading, and maintains a precise velocity measurement throughout the GPS drop outs.
HEADING
The heading reading here is very consistent, providing more accurate results than the GPS only data, which exhibits some noise, even in low speeds.
POSITION
When mapping vehicle position along a heavily tree lined road, the GPS signal incurs some drop outs and reflections, producing noisy position readings. However, IMU integration corrects the position measurements, creating smoother, more accurate data.
ACCELERATION
IMU Integration data provides a smoother, more accurate representation of longitudinal acceleration (measured in G-force) during an ABS brake stop.
BRAKE TESTING USING IMU INTEGRATION
Conducting brake tests on tall vehicles with long suspension travel can result in a speed overshoot of the velocity data, due to the measurements being taken at the high roof position of the GPS antenna. As the brakes are initially applied, there is a higher rate of change in velocity at the roof than there is at the vehicle’s centre of gravity (COG).
However, the integration of an IMU04 or IMU03 with a suitably upgraded VBOX 3i can be used to counteract this ‘lever-arm’ effect by placing the IMU at the COG, which measures the vehicle pitch as it brakes. This data, when combined with that from GPS, provides a compensation for the overshoot and allows for consistent brake stop testing.

The graphs below show how point A has travelled further than point B:
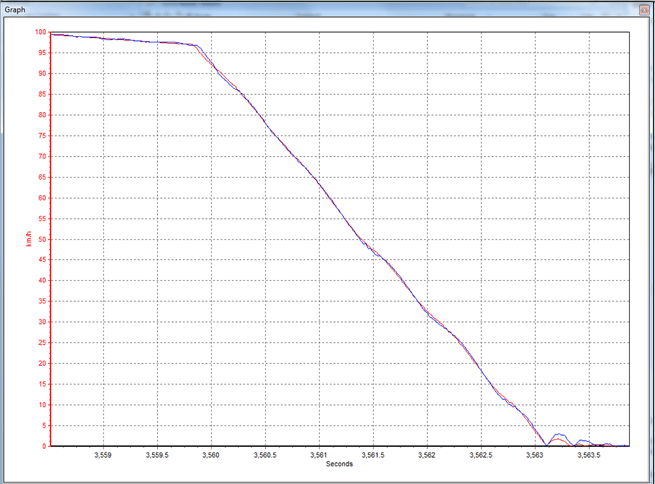
In this example of a high-dynamic brake stop, the blue trace (GPS Speed) overshoots at the initial point of brake application, and then exhibits a damped oscillation as the deceleration continues. The IMU-corrected data (red trace) accurately records the brake stop from the vehicles centre of gravity.
Counteracting the lever-arm effect will also aid test engineers when conducting high-dynamic manoeuvres other than brake stops. In slip angle measurements the speed overshoot can occur if the antenna is moving through a greater arc of travel than that of the vehicle’s centre of gravity as it corners. Procedures such as lane change manoeuvres can therefore benefit from IMU integration and lever-arm compensation.

Orange = Pitch measured by the IMU Blue = GPS speed Red = IIMU itegrated GPS speed
The traces between the green and red vertical lines are of a car going over a speed hump. Note how the GPS speed alters as the vehicle roof moves independently of the COG as it goes over the hump. The integrated speed logs the correct speed of the vehicle.